NEWS & COLUMN ข่าว&คอลัมน์
【Learning Vol-05】การสแกน 3D ทำงานอย่างไร
■ นักข่าวด้านเทคนิค:Natalia Kivolya
■ ภาพรวม:
การเข้าสู่โลกแห่งการสแกน 3D อาจเป็นเรื่องน่ากลัว แต่เมื่อคุณเข้าใจเทคโนโลยีที่อยู่เบื้องหลัง ทุกอย่างก็จะชัดเจน จากตาของคุณเอง (โมเดลพื้นฐานสำหรับการสแกน 3D) ไปจนถึงสแกนเนอร์ 3D ล่าสุดในตลาด นี่คือวิธีการทำงาน

หากต้องการดู สแกน และใช้ทุกมิติในโลกของเรา
ก่อนที่จะดำดิ่งสู่โลกอันน่าทึ่งของการสแกน 3D – เลเซอร์สแกนเนอร์, สแกนเนอร์แสงที่มีโครงสร้าง, ซอฟต์แวร์การออกแบบ, แบบจำลอง 3D – โลก 3 มิติที่อยู่รอบตัวเราและเป็นตัวแทนของเราในทุกที่คืออะไร เรามาทำความเข้าใจกันดีกว่า ทุกคนรู้ว่าเราอยู่ในโลก 3 มิติ แม้แต่คนที่ไม่รู้ว่าเครื่องสแกน 3D คืออะไร แต่จริง ๆ แล้ว “โลก 3 มิติ” หมายถึงอะไร? หมายความว่าพื้นที่ที่อยู่รอบตัวเราเป็น 3 มิติ และตำแหน่งของสิ่งใดสิ่งหนึ่งสามารถอธิบายได้ด้วยตัวเลขสามตัว (เรียกอีกอย่างว่าพารามิเตอร์หรือพิกัด) มีหลายวิธีในการระบุพารามิเตอร์ทั้งสามนี้ และกฎนี้เรียกว่า “ระบบพิกัด”
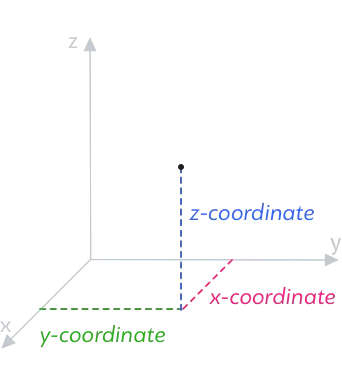
ระบบพิกัดที่พบมากที่สุด: ระบบพิกัดคาร์ทีเซียน
เมื่อเราพูดถึงความกว้าง, ความสูง และความลึกของสิ่งต่าง ๆ รอบตัวเรา เราใช้คำว่าระบบพิกัดคาร์ทีเซียน ซึ่งอาจเป็นได้ทั้งคนถนัดขวา (RHS) หรือคนถนัดซ้าย (LHS) ข้อแตกต่างเพียงอย่างเดียวระหว่างทั้งสองคือทิศทางของแกน Z ซึ่งระบุความลึก
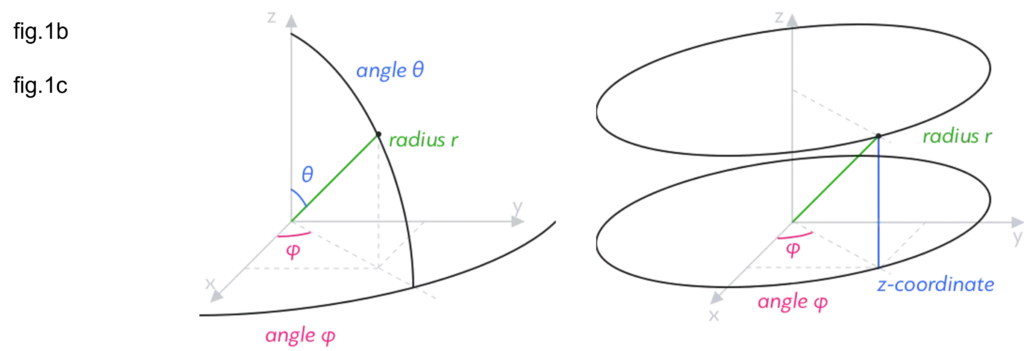
มีระบบพิกัดอื่นอีกหลายระบบ เช่น ระบบพิกัดทรงกลม (ซ้าย) และระบบพิกัดทรงกระบอก (ขวา)
สิ่งที่ระบบพิกัด 3D ทั้งหมดมีเหมือนกันคือมีพารามิเตอร์อิสระสามตัวที่อธิบายตำแหน่งของจุดใด ๆ ในอวกาศได้อย่างชัดเจน ไม่ว่าจะเป็นพื้นผิวหรืออื่น ๆ ดูเหมือนจะไม่มีสมอง แต่เมื่อพูดถึงเครื่องสแกน 3D และการสแกน หลักการพื้นฐานเหล่านี้ช่วยให้เราเข้าใจและใช้ประโยชน์จากเทคโนโลยีที่เปลี่ยนแปลงโลกนี้ได้ดียิ่งขึ้น
การอภิปรายเกี่ยวกับมิติต่าง ๆ เกี่ยวกับโลกของเครื่องสแกน 3D และการสแกนจะยิ่งมีความสำคัญมากขึ้นเมื่อพิจารณาถึงความแม่นยำและความละเอียดของโซลูชันและซอฟต์แวร์การสแกน 3D ระดับมืออาชีพในปัจจุบัน ในระดับที่ไกลเกินกว่าที่สายตามนุษย์จะมองเห็นได้ ประสิทธิภาพของเครื่องสแกน 3D สมัยใหม่ต้องอาศัยฮาร์ดแวร์และระบบพิกัดบนซอฟต์แวร์ที่เชื่อถือได้และทำซ้ำได้ทั้งหมด
เกี่ยวกับวัตถุและการสแกน 3D
นอกจากตำแหน่งในอวกาศแล้ว วัตถุทางกายภาพทั้งหมดยังมีมิติอีกด้วย วัตถุมีขนาด 0, 1, 2 และ 3
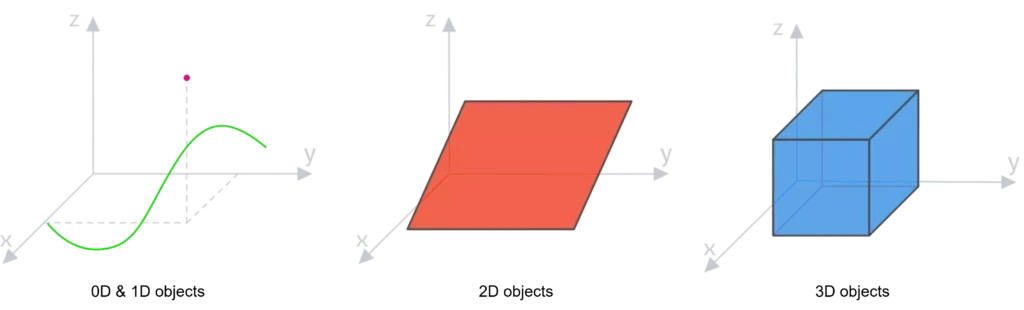
พิจารณาบางสิ่งที่เล็กมาก เช่น อะตอม เรียกได้ว่าเป็นจุดเพราะใช้พื้นที่น้อยมาก วัตถุที่มีตำแหน่งในอวกาศที่สามารถแสดงด้วยพิกัด x, y และ z แต่ไม่มีมิติ เรียกว่าวัตถุ 0 มิติ มีเครื่องสแกน 1D, 2D และ 3D แต่ไม่มีเครื่องสแกน 0D
ตัวอย่างของวัตถุหนึ่งมิติคือห่วงโซ่ที่บางมาก แต่ละลิงก์จะมี “ลิงก์ที่อยู่ติดกัน” เพียงสองลิงก์เท่านั้น ยกเว้นลิงก์แรกและลิงก์สุดท้าย
กระดาษบาง (c) เป็นวัตถุ 2 มิติเนื่องจากมิติที่ 3 (ความหนา) มีขนาดเล็กเมื่อเทียบกับความกว้างและความสูง
ตัวอย่างง่าย ๆ ของวัตถุ 3D คือกล่องซึ่งมีความกว้าง, ความสูง และความลึก และใช้พื้นที่คงที่ใน 3 มิติทั้งหมด
สำหรับเครื่องสแกน 3D ระดับมืออาชีพในตลาดปัจจุบัน ผู้ผลิตจะระบุขนาดของวัตถุที่สแกน 3D ที่ดีที่สุดบนหน้าผลิตภัณฑ์หรือในรายละเอียดของผลิตภัณฑ์ เครื่องสแกน 3D มีหลายขนาด รวมถึงเครื่องสแกนตั้งโต๊ะแบบอัตโนมัติสำหรับวัตถุขนาดเล็ก เครื่องสแกนแบบพกพาที่มีโครงสร้างเบาสำหรับวัตถุขนาดเล็กและขนาดกลาง และเครื่องสแกนเลเซอร์ 3D สำหรับวัตถุขนาดใหญ่และยักษ์ นอกจากนี้ โมเดล 3D ที่สร้างโดยสแกนเนอร์เหล่านี้ยังสามารถปรับขนาดได้ตามต้องการ เช่น ผ่านซอฟต์แวร์ออกแบบ CAD ระดับมืออาชีพ
คุณและฉันรับรู้อย่างไร (สแกนจิตใจ) โลกในแบบ 3D
ข้อมูลส่วนใหญ่เกี่ยวกับวัตถุที่อยู่ห่างไกลมาจากแสง แสงเป็นคลื่นแม่เหล็กไฟฟ้าที่เดินทางผ่านอวกาศได้เร็วที่สุด แสงส่วนใหญ่มาจากดวงอาทิตย์ แต่แสงจะสะท้อนออกจากพื้นผิว, ถูกดูดซับ, สะท้อนกลับ และส่องต่อไปจนกว่าจะไม่ถูกดูดกลืน แสงสามารถเกิดขึ้นได้มากมาย แสงสามารถสะท้อน, หักเห, กระจัดกระจาย, ดูดกลืน และแม้แต่เปลี่ยนคุณสมบัติของแสง เช่น สี, ความเข้ม และทิศทางหลังจากชนวัตถุในเส้นทาง
ดวงตาของมนุษย์เป็นอวัยวะรับความรู้สึกที่รับรู้ทิศทาง, ความเข้ม และสีของแสงที่มองเห็น ลูกตามีเลนส์ผลึกที่รวบรวมแสงผ่านไปยังเรตินา เรตินาประกอบด้วยเซลล์พิเศษที่ตอบสนองต่อแสงและประกอบด้วยเซลล์ประมาณ 120 ล้านแท่งและเซลล์รูปกรวย 6-7 ล้านเซลล์ คุณสามารถเห็นเป็นขาวดำด้วยแท่งเหล่านี้ และสีด้วยกรวย ในการดูสีนั้น ตาของเราจะรวบรวมลำแสงจากสิ่งรอบตัวแล้วส่งไปยังเรตินา
ส่งผลให้วัตถุที่อยู่ห่างไกลดูพร่ามัวเมื่อมองไปยังวัตถุใกล้เคียง และในทางกลับกัน เราใช้กระบวนการโฟกัสแบบพิเศษที่เรียกว่า “การสะท้อนแบบผ่อนแรง” เพื่อให้มองเห็นระยะทางตั้งแต่ 6-7 ซม. ถึงระยะอินฟินิตี้ได้อย่างชัดเจน ส่วนใหญ่แล้ว การกักกันสะท้อนกลับจะทำงานแบบสะท้อนกลับ แต่ก็สามารถควบคุมได้ด้วยสติเช่นกัน
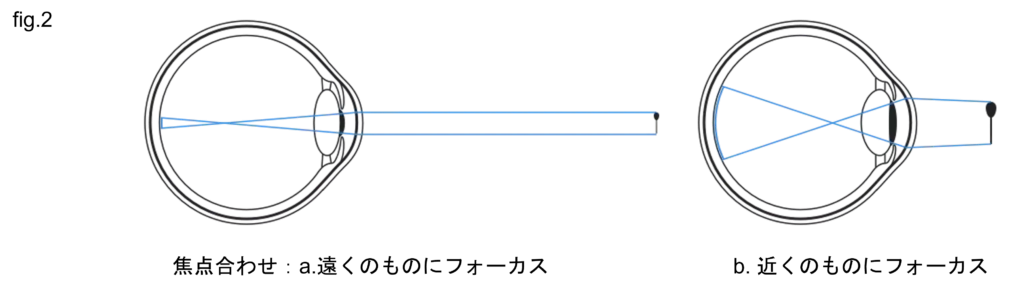
ลักษณะหนึ่งของที่พักคือความสามารถในการโฟกัสที่ระยะต่าง ๆ โดยการปรับเลนส์ตาที่จำเป็นด้วยกล้ามเนื้อที่สัมพันธ์กัน ดังแสดงในรูปที่ 2
ตาของมนุษย์ไม่สามารถรับรู้ความลึกได้ แต่สามารถแยกความแตกต่างระหว่างวัตถุที่อยู่ใกล้และไกลได้ในขณะที่ทำการโฟกัส ด้วยเหตุนี้การมีตาที่สองจึงสร้างความแตกต่างอย่างมาก
การมองเห็นสามมิติของมนุษย์ใช้สิ่งที่เรียกว่า “เอฟเฟกต์สามมิติ” เอฟเฟ็กต์นี้หมายถึงข้อเท็จจริงที่ว่าเมื่อมองวัตถุจาก 2 ตำแหน่งที่แตกต่างกัน ภาพที่ตาแต่ละข้างมองเห็นจะคล้ายกันแต่จะเปลี่ยนไปเล็กน้อย ขนาดของการเปลี่ยนแปลงนี้ขึ้นอยู่กับความลึก (ระยะห่าง) ระหว่างคุณกับวัตถุ และมีแนวโน้มที่วัตถุที่อยู่ใกล้คุณจะเปลี่ยน ปรากฏการณ์นี้เรียกว่า “Retinal (Binocular) Disparity” หรือที่เรียกว่า “Binocular Parallax”
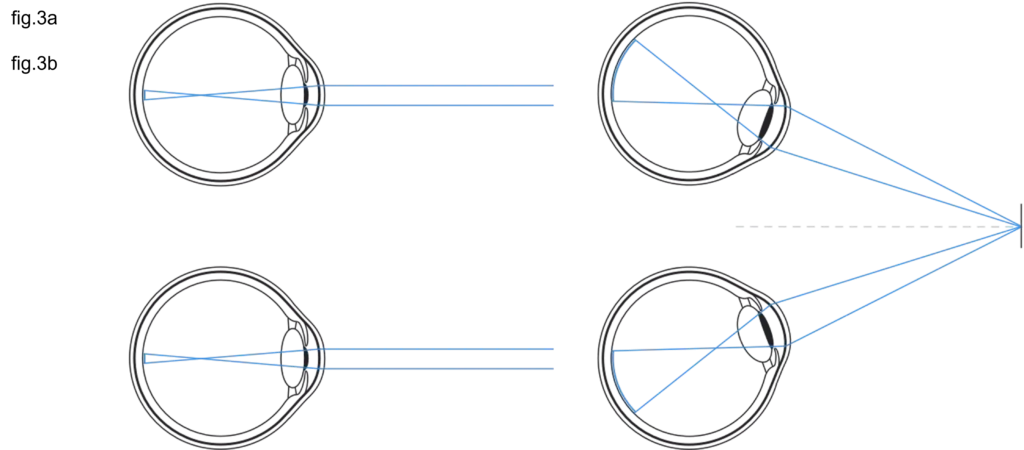
น่าเสียดายที่ความละเอียดของตาคนเราไม่เท่ากันในทุกสิ่งที่เรามองเห็น กรวยที่มีความเข้มข้นสูงสุดจะอยู่ตรงกลาง ดังนั้นหากคุณต้องการความละเอียดและการรับรู้เชิงลึกที่ดี คุณต้องให้ตาทั้งสองข้างจับจ้องที่วัตถุโดยตรง การมองเห็นในระยะใกล้ (ดูรูปที่ 3b) ใช้กล้ามเนื้อนอกตา ทำให้มุมรับภาพมีขนาดเล็กลงอย่างมากเมื่อโฟกัสวัตถุที่อยู่ไกล
ภาพสองภาพที่ฉายบนเรตินา (ภาพหนึ่งจากตาแต่ละข้าง) จะเดินทางผ่านเส้นประสาทตาไปยังระบบสมองส่วนภาพต่าง ๆ สมองส่วนต่าง ๆ จะวิเคราะห์ภาพพร้อมกัน ส่วนหนึ่งตรวจจับรูปร่างพื้นผิวอย่างง่าย, ส่วนหนึ่งจดจำการเคลื่อนไหว, ส่วนหนึ่งเปรียบเทียบกับภาพที่เรียนรู้ก่อนหน้านี้ และอื่น ๆ
ในท้ายที่สุด ในเวลาประมาณ 50 มิลลิวินาที ข้อมูลทั้งหมดจะมาถึงจิตสำนึกของเรา โดยสังเกตเห็นสี, ความลึก, การเคลื่อนไหว และรูปร่างของสิ่งที่เราเห็น เครื่องสแกน Artec 3D ทำงานในลักษณะเดียวกันมาก แต่สามารถวัดความลึกได้แม่นยำกว่าระบบการมองเห็นของมนุษย์มาก
ตามนุษย์, การรับรู้ 3D, เครื่องสแกน 3D
การมองเห็น 3D ไม่ได้ผลเสมอไป เนื่องจากแสงจะทำงานแตกต่างกันไปในแต่ละสถานการณ์
ในความเป็นจริง วัตถุทั้งหมดที่มีขนาดใหญ่กว่านาโนเมตรเป็นแบบ 3D แต่เป็นการยากที่ตามนุษย์หรือเครื่องสแกนจะมองเห็นพื้นผิวทั้งหมดของวัตถุพร้อมกัน ตัวอย่างเช่น วัตถุเชิงซ้อนที่ไม่โปร่งใสอาจมีด้านหลังถูกบดบังด้วยด้านหน้า โดยเฉพาะอย่างยิ่งสำหรับวัตถุที่มีรูปร่างที่ไม่รู้จัก สิ่งสำคัญคือต้องสังเกต (สแกน) วัตถุเหล่านั้นจากหลาย ๆ มุมมอง เพื่อที่จะเข้าใจภาพรวมของภาพสามมิติ นอกจากนี้ อาจเป็นเรื่องยากที่จะรับรู้วัตถุขนาดใหญ่ที่มีสีสม่ำเสมอและรูปร่างเรียบง่าย เช่น พื้นผิวเรียบหรือเรียบมาก
【จุดสำคัญ】----------------------------------------
ตัวอย่างที่ดีคือเมื่อคุณพยายามจอดรถในที่จอดรถที่ทาด้วยสีอ่อนทั้งหมด หากพื้นหลังเป็นสีเดียวกันทั้งหมด และไม่มีลักษณะที่มองเห็นได้เพื่อตัดกับแนวของช่องจอดรถ ตาและสมองของคุณจะรับรู้ความลึกของพื้นที่ได้ยากมาก
นอกจากนี้ยังอาจเป็นเรื่องยากที่จะรับรู้วัตถุขนาดใหญ่ที่มีสีสม่ำเสมอและรูปทรงเรขาคณิตที่เรียบง่ายในแบบ 3D รวมถึงวัตถุที่มีพื้นผิวเรียบหรือเรียบมาก
สแกนเนอร์ 3D ระดับมืออาชีพจำนวนมากประสบปัญหาเนื่องจากประสบปัญหาในการระบุตัวตนข้างต้นเมื่อสแกนพื้นผิวสีดำหรือสีเข้ม สำหรับช่างเทคนิคและผู้เชี่ยวชาญด้านการสแกน 3D หลาย ๆ คน นี่เป็นอุปสรรค์ที่หนักหนาสาหัส และมักต้องใช้กลยุทธ์การสแกนที่ต่างออกไป หรือแม้แต่สแกนเนอร์ที่ต่างออกไปโดยสิ้นเชิง ที่กล่าวว่า หากคุณสแกนพื้นผิวมืดแบบ 3D อย่างน้อยเป็นครั้งคราว คุณควรทดสอบประสิทธิภาพของเครื่องสแกน 3D ของคุณกับวัตถุดังกล่าวทุกครั้งที่ทำได้ก่อนที่จะซื้อ การเลือกเครื่องสแกนที่ดีที่สุดสำหรับงานนั้นเป็นมากกว่าความแม่นยำและความละเอียด
โมเดล 3D โดยการสแกน CAD และอื่น ๆ
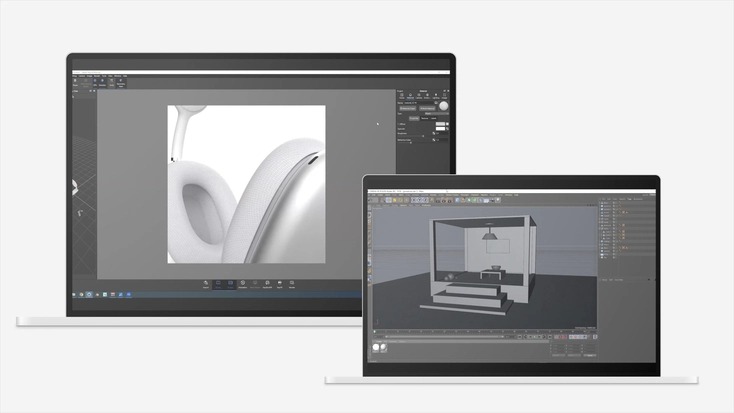
โซลูชันการสแกน 3D ระดับมืออาชีพในปัจจุบัน เช่น เครื่องสแกนแสงที่มีโครงสร้าง, เลเซอร์สแกนเนอร์ และซอฟต์แวร์มีความเกี่ยวข้องอย่างใกล้ชิดกับเทคโนโลยีคอมพิวเตอร์ สิ่งนี้ทำให้เกิดการพัฒนาเครื่องจักรที่ควบคุมด้วยคอมพิวเตอร์แบบใหม่ หรือที่เรียกว่า CNCs (Computer Numerical Control) เทคโนโลยี CNC ช่วยให้เราสามารถก้าวหน้าอย่างมากในการผลิตวัตถุที่มีรูปทรงต่าง ๆ (บางครั้งเรียกว่าพื้นผิวรูปทรงอิสระ)
แนวคิดหลักของ CNC คือคอมพิวเตอร์ควบคุมเครื่องมือเครื่องจักรแทนมนุษย์ คอมพิวเตอร์สามารถทำได้ด้วยระดับความถูกต้องสูงสุด, แม่นยำสูง และมีประสิทธิภาพดีเยี่ยม แต่คอมพิวเตอร์ต้องการคำสั่งพิเศษเพื่อบอกว่าต้องทำอะไร คำสั่งนี้สร้างโดยระบบซอฟต์แวร์ที่เรียกว่า CAM (Computer Aided Manufacturing) หรือ CAD (Computer Aided Design) ต่อไปนี้เป็นคำอธิบายสั้น ๆ ว่าคอมพิวเตอร์ทำงานกับวัตถุ 3D อย่างไร
จุดยอดคืออะไรและเกี่ยวข้องกับการสแกน 3D อย่างไร
ในโลกของคอมพิวเตอร์กราฟิกและเครื่องสแกน 3D จุดยอดคือโครงสร้างข้อมูลที่อธิบายคุณลักษณะต่าง ๆ ของจุด คุณลักษณะหลักของจุดคือตำแหน่ง แต่คุณลักษณะอื่น ๆ ได้แก่ สี, การสะท้อนแสง, พิกัด, เวกเตอร์ปกติและเส้นสัมผัส และอื่น ๆ เนื่องจากจุดยอดมักถูกมองว่าเป็นจุดที่เส้น, เส้นโค้ง และขอบมาบรรจบกัน ฟังก์ชันรูปร่างพื้นฐานนี้จึงมักใช้เพื่อแสดงรูปร่างที่ซับซ้อนมากขึ้น เช่น ขอบ, ใบหน้า, ตาข่าย และพื้นผิว ด้วยเหตุนี้ แอตทริบิวต์ของจุดยอดบางรายการจึงไม่ได้แสดงเฉพาะจุด แต่รวมถึงพื้นผิวทั้งหมดรอบ ๆ และจุดใกล้เคียงด้วย และ point cloud มักจะเป็นอาร์เรย์/กลุ่มของจุดยอดที่สร้างโดยเครื่องสแกน 3D โดยเฉพาะเครื่องสแกนเลเซอร์ 3D
Edge คืออะไร?
Edge คือเส้นตรงที่เชื่อมต่อจุดสองจุด (จุดยอด) นอกจากนี้ยังสามารถเป็นส่วนหนึ่งของใบหน้า
คำอธิบายสั้น ๆ ของใบหน้าและโพลิกอน
ใบหน้าคือลำดับของขอบปิด จุดยอดของใบหน้าแต่ละด้านมีขอบสองด้านที่เชื่อมต่อกัน ใบหน้ารูปสามเหลี่ยมมีสามด้านและใบหน้ารูปสี่เหลี่ยมมีสี่ด้าน
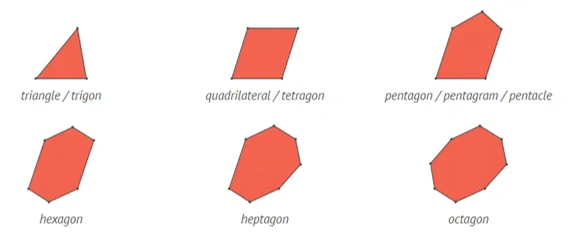
ใบหน้าที่มีสามด้านหรือมากกว่านั้นเรียกว่า polygons และเริ่มต้นด้วยคำนำหน้าที่มาจากภาษากรีกซึ่งสอดคล้องกับจำนวนด้านและคำต่อท้าย “gon” รูปห้าเหลี่ยมมี 5 ด้าน, รูปหกเหลี่ยมมี 6 ด้าน, รูปห้าเหลี่ยมมี 7 ด้าน และรูปแปดเหลี่ยมมี 8 ด้าน
โพลิกอนที่มีสี่ด้านขึ้นไปสามารถแทนที่ด้วยจำนวนสามเหลี่ยมหรือรูปสี่เหลี่ยมที่สอดคล้องกันซึ่งประกอบกันเป็นรูปร่างได้
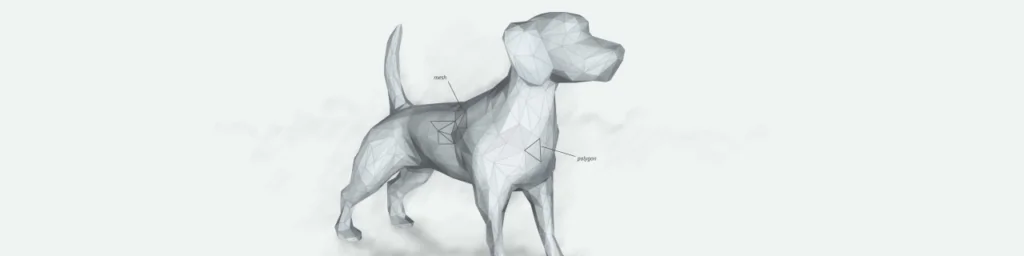
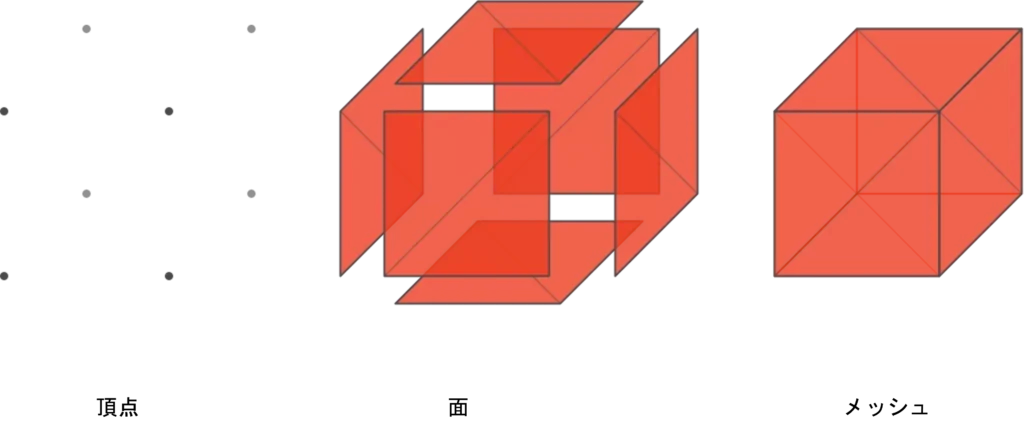
ตาข่ายในโลกของการสแกน 3D
เทคโนโลยี Mesh in 3D (รวมถึงโมเดลที่สร้างขึ้นด้วยเครื่องสแกน 3D) หมายถึงวิธีการแสดงพื้นผิวในซอฟต์แวร์โดยใช้คอมพิวเตอร์กราฟิก พูดง่าย ๆ คือเป็นชุดของจุดยอดและใบหน้าที่มีข้อมูลเกี่ยวกับลักษณะของจุดยอดและการเชื่อมต่อกันอย่างไร
ใบหน้ามักประกอบด้วยโพลิกอนทุกชนิด แต่ส่วนใหญ่เป็นโพลิกอน ซึ่งง่ายต่อการติดตั้งบน GPU (Graphics Processing Units) ตาข่ายบางประเภทต้องการประเภทโพลิกอนเฉพาะ และกฎขึ้นอยู่กับแอปพลิเคชัน
Face-vertex : ชุดของจุดยอดที่จะใช้และโพลิกอนที่ชี้ไป
Winged-edge : ขอบแต่ละด้านมีจุดยอด 2 จุด, 2 ด้าน และขอบ 4 ด้านที่สัมผัสกัน
Quad-edge : ประกอบด้วยขอบ, ครึ่งขอบ และจุดยอด ไม่มีการกล่าวถึงโพลิกอน
Corner-tables : จัดเก็บจุดยอดในตารางที่กำหนดไว้ล่วงหน้าเพื่อกำหนดโพลิกอน
นี่คือแฟนตัวยงของรูปสามเหลี่ยมที่ใช้ในการเรนเดอร์กราฟิกฮาร์ดแวร์ การเป็นตัวแทนมีขนาดกะทัดรัดมากขึ้นและการเรียกค้นโพลิกอนมีประสิทธิภาพมากขึ้น แต่การดำเนินการแก้ไขโพลิกอนจะช้ากว่า นอกจากนี้ corner-tables ไม่สามารถแสดงถึงตาข่ายได้อย่างเต็มที่ ต้องใช้ corner-tables หลายตัว (Triangle Fans) เพื่อแสดงถึงตาข่ายส่วนใหญ่
ertex-vertex meshes: ตาข่ายที่ใช้จุดยอดที่ชี้ไปยังจุดยอดอื่นเท่านั้น เป็นรูปแบบที่มีประสิทธิภาพด้านขนาดมาก แต่จำกัดช่วงของการดำเนินการที่มีประสิทธิภาพแบบตาข่ายที่สามารถทำได้
ตาข่ายสามเหลี่ยม (ตาข่ายโพลิกอนประกอบด้วยสามเหลี่ยม)
สามารถสร้างตาข่ายธรรมดาได้ด้วยตนเอง แต่ตาข่ายที่ซับซ้อนสามารถสร้างแบบจำลองได้โดยใช้สูตรทางคณิตศาสตร์, อัลกอริทึม หรือโดยการจับภาพวัตถุทางกายภาพแบบดิจิทัลด้วยเครื่องสแกน 3D ลักษณะที่สำคัญที่สุดอย่างหนึ่งของตาข่ายคือความเรียบง่าย มีหลายวิธีในการจับภาพและแสดงพื้นผิวเดียวกันแบบดิจิทัล
เกี่ยวกับ voxels และการสแกน 3D
ปริมาตรโดยรวมในระบบพิกัดคาร์ทีเซียนสามารถแบ่งออกเป็นรูปสี่เหลี่ยมด้านขนานเล็ก ๆ ถ้าขนาดแกน x, แกน y และแกน z เท่ากัน แสดงว่าเป็นลูกบาศก์ สามารถสร้าง solid ได้มากเท่าที่มี voxels ที่ทำให้ง่ายขึ้นด้วยวิธีนี้ และยิ่ง voxels มีขนาดเล็กลง การประมาณค่าก็จะยิ่งแม่นยำมากขึ้นเท่านั้น
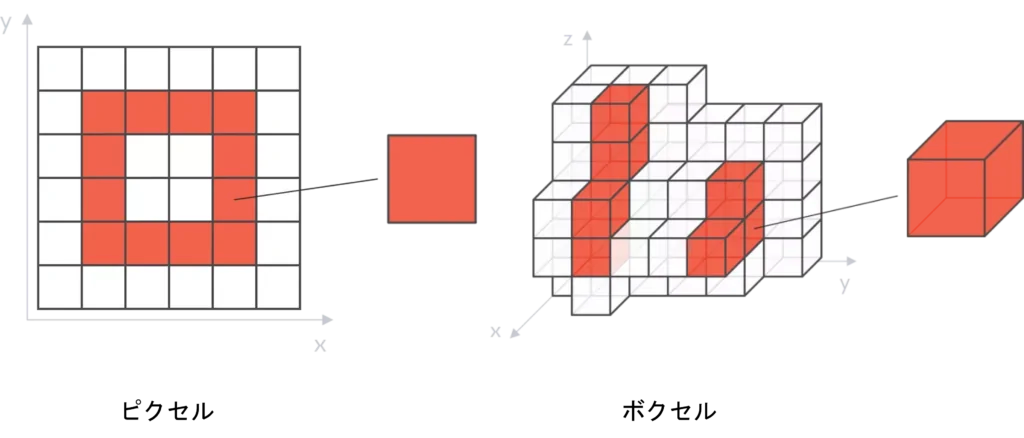
พิกัด Voxel ถูกกำหนดโดยตำแหน่งในอาร์เรย์ข้อมูล เนื่องจากลักษณะมาตรฐานของข้อมูลและรูปร่างพื้นฐานของ voxels การประมวลผลจึงตรงไปตรงมาและมีประสิทธิภาพ แต่โดยปกติแล้วต้องการพื้นที่ดิสก์เพิ่มเติมสำหรับการจัดเก็บและหน่วยความจำสำหรับการประมวลผล เช่นเดียวกับภาพดิจิทัล 2D พื้นผิวที่ไม่ใช่สี่เหลี่ยมซึ่งเป็นตัวแทนของพื้นผิวของ voxels จะมีข้อมูลที่แยกจากกัน
โมเดลที่ไม่ใช่สี่เหลี่ยมควรมี voxels ขนาดเล็กมากเพื่อความแม่นยำ ในกรณีนี้ voxels มักไม่ค่อยใช้เพื่อแสดงวัตถุประเภทนี้ เนื่องจากพื้นที่ดิสก์จำนวนมาก Voxels มีประสิทธิภาพมากที่สุดสำหรับการแสดงวัตถุที่ซับซ้อนและหลากหลาย ทำให้เหมาะสำหรับการสแกน 3D, การสร้างภาพ และโซลูชัน CAD
สิ่งที่เกี่ยวกับ solid ที่สแกนหรือรูปทรงเรขาคณิต 3D?
วัตถุจริงทุกชิ้นมีปริมาตรเชิงพื้นที่ที่แน่นอนและประกอบด้วยสสารบางชนิด มีหลายวิธีในการสร้างแบบจำลองวัตถุที่เป็น solid เช่น การกวาด, การสร้างแบบจำลองตาข่ายพื้นผิว และการสลายตัวของเซลล์ วัตถุใด ๆ ก็มีขอบเขต (พื้นผิว) และขอบเขตของวัตถุทึบจะแบ่งพื้นที่ออกเป็นสองส่วน คือ พื้นที่ภายในและภายนอกของวัตถุทึบ ด้วยวิธีนี้ วัตถุทึบสามารถแสดงด้วยข้อมูลบางอย่าง เช่น ขอบเขตและตาข่าย และสามารถแยกภายในและภายนอกได้
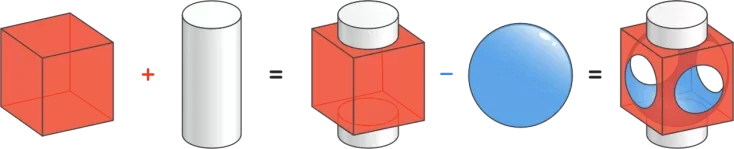
ผลลัพธ์ CSG Solid Shape ที่สร้างสรรค์
ในกรณีนี้ องค์ประกอบพื้นฐานเป็น solid อยู่แล้ว (ทรงกลม, กรวย, ลูกบาศก์, โทริ ฯลฯ) และจาก solid ดั้งเดิมเหล่านี้เราสร้าง solid ที่สูงขึ้นด้วยการดำเนินการบูลีน (ฟิวชัน, การลบ, การตัดกัน ฯลฯ)
การประยุกต์ใช้กับพื้นผิวและการสแกน 3D
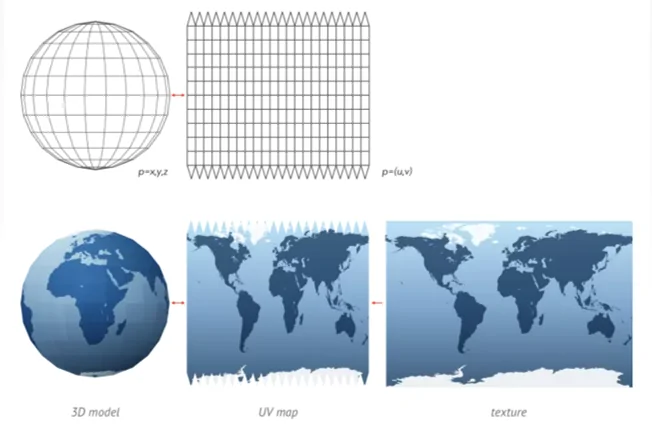
ในแง่คอมพิวเตอร์กราฟิกและการสแกน 3D พื้นผิวคือภาพที่วาดบนพื้นผิว ภาพพื้นผิวถูกจัดเก็บไว้ในไฟล์พิเศษซึ่งแต่ละพิกเซลที่มีพิกัด U และ V มีสีที่สอดคล้องกัน การใช้พื้นผิวกับพื้นผิวเรียกว่าการทำแผนที่พื้นผิวหรือการทำแผนที่ UV
เนื่องจากสมองของมนุษย์อาศัยเงา, สี และการไล่ระดับสีในการรับรู้โลก พื้นผิวที่สามารถสร้างรูปร่างได้โดยไม่ต้องเปลี่ยนแปลงจึงมีประสิทธิภาพอย่างมาก ช่วยให้ผู้ผลิตเกมคอมพิวเตอร์เพื่อแสดงกราฟิกอย่างรวดเร็วและมีประสิทธิภาพ
ผู้ผลิตเครื่องสแกน 3D สามารถติดตั้งกล้องพิเศษสำหรับจับภาพพื้นผิว ซึ่งเรียกว่ากล้องพื้นผิว เว้นแต่ว่าตัวสแกนเนอร์จะมีแฟลช จำเป็นต้องมีสภาพแสงที่สว่างสม่ำเสมอเพื่อให้ได้ภาพที่มีคุณภาพดี

บทสรุปเกี่ยวกับเทคโนโลยี 3D การสแกน การใช้งานในปัจจุบันและแนวโน้มในอนาคต
การทำความเข้าใจเกี่ยวกับส่วนประกอบต่าง ๆ ของเทคโนโลยี 3D ไม่เพียงแต่ช่วยให้เราเข้าใจแง่มุมที่กระตุ้นความคิดของโลกรอบ ๆ ตัวเราได้ดีขึ้น แต่ยังรวมถึงวิธีการทำงานของโซลูชัน 3D รวมถึงการสแกน 3D ในทางปฏิบัติ นอกจากนี้ยังเป็นประโยชน์สำหรับการรู้
โดยเฉพาะอย่างยิ่งในช่วงสองทศวรรษที่ผ่านมา เทคโนโลยี 3D ได้มีส่วนร่วมในโครงการทางวิทยาศาสตร์ที่ท้าทายและมีความสำคัญมากมายตั้งแต่ตะวันออกจรดตะวันตก ตัวอย่างเช่น มีการใช้เลเซอร์สแกนเนอร์ 3D และซอฟต์แวร์เพื่ออนุรักษ์มรดกทางวัฒนธรรมและวัตถุที่ใกล้จะถูกทำลาย วิศวกรที่ใช้เครื่องสแกน 3D โครงสร้างเบาแบบมือถือจะทำวิศวกรรมย้อนกลับชิ้นส่วนที่มีพื้นผิวและรูปทรงที่ซับซ้อน จากนั้นใช้โมเดล 3D ในขั้นตอนสุดท้ายด้วยซอฟต์แวร์ออกแบบ CAD
ดังนั้น การเข้าใจประโยชน์ของเทคโนโลยี 3D จึงมีความสำคัญมากขึ้นทุกวันทั่วโลก เนื่องจากการใช้เทคโนโลยี 3D แพร่หลายไปทั่วสังคม ผู้เชี่ยวชาญบางคนกล่าวว่าในอนาคต เทคโนโลยี 3D จะถูกใช้กันอย่างแพร่หลายในบ้าน, โรงเรียน และที่ทำงาน
【จุดสำคัญ】----------------------------------------
ปัจจุบัน การใช้เทคโนโลยี 3D กำลังขยายตัวในสาขาต่าง ๆ เช่น การบินและอวกาศ, วิศวกรรม, การผลิตดิจิทัล, การดูแลสุขภาพ, CGI เป็นต้น ในอนาคต ผู้เชี่ยวชาญด้าน 3D ที่มีประสบการณ์ในการสแกนจะเป็นที่ต้องการมากขึ้นสำหรับทักษะและความเชี่ยวชาญของพวกเขา
คนรุ่นใหม่ในปัจจุบันเติบโตขึ้นโดยคิดว่าเครื่องสแกน 3D ไม่ได้เป็นเพียงสิ่งของในห้องแล็บหรือในภาพยนตร์และนวนิยายแนววิทยาศาสตร์เหมือนที่เคยเป็นมาเมื่อหลายสิบปีก่อน ในแต่ละปีที่ผ่านไป การสแกน 3D แบบมืออาชีพเข้ามาใกล้ชีวิตประจำวันของเรามากขึ้น และผู้ผลิตเทคโนโลยีเหล่านี้ให้ความสำคัญอย่างมากในการผสานรวมโซลูชันของตนเข้ากับทุกระดับของโซลูชันส์อย่างไร้รอยต่อ ด้วยเหตุนี้ แม้แต่เด็ก ๆ ก็ยังรู้สึกสบายใจในการใช้เครื่องสแกนแสงที่มีโครงสร้างในห้องเรียน และเราได้เห็นเครื่องสแกน 3D ถูกนำมาใช้ในสำนักงานทางการแพทย์และทันตกรรม สิ่งที่เคยจำกัดอยู่ในขอบเขตของผู้เชี่ยวชาญ บัดนี้กลายเป็นส่วนสำคัญในชีวิตประจำวันของเรา
ผู้ผลิตซอฟต์แวร์และเครื่องสแกน 3D ระดับมืออาชีพ เช่น เครื่องสแกนเลเซอร์และเครื่องสแกนแสงที่มีโครงสร้าง มีความก้าวหน้าอย่างมากในการเพิ่มความแม่นยำและความละเอียดของเครื่องสแกน ในขณะเดียวกัน นักออกแบบและผู้เชี่ยวชาญด้านเทคนิคอื่น ๆ พบว่าเครื่องสแกน 3D และโมเดล 3D ที่ได้นั้นสามารถลดภาระงานได้ ทำให้สามารถทำงานที่เคยเป็นไปไม่ได้หรือยากมาก ๆ ให้สำเร็จได้ การสแกน 3D กลายเป็นเรื่องง่ายที่จะนำมาใช้
วิศวกรคาดหวังว่าโซลูชันต่าง ๆ เช่น แอปพลิเคชันด้านการศึกษา VR/AR จะพร้อมใช้งานอย่างกว้างขวาง วิศวกรออกแบบดิจิทัลจะใช้การสแกนและการสร้างแบบจำลอง 3D อย่างกว้างขวาง ดูและโต้ตอบกับวัตถุที่ออกแบบโดยใช้สภาพแวดล้อม VR/AR และการพิมพ์ 3D ในวัสดุต่าง ๆ ตามความต้องการ นี่เป็นเพียงจุดเริ่มต้นในการปลดล็อกศักยภาพอันยอดเยี่ยมของการสแกน 3D